Summary¶
I did my PhD from 2020 to 2023 at the École des Ponts in the computer vision team IMAGINE (LIGM, École des Ponts, Univ Gustave Eiffel, CNRS) and at the IGN—the French Mapping Agency—in the Spatio-Temporal Structures for Spatial Analysis team of the LASTIG (LASTIG, Univ Gustave Eiffel, IGN/ENSG), advised by Mathieu Aubry and Loïc Landrieu. I am interested in optimisation and machine learning for 3D data, with a focus on unsupervised learning, interpretability, and real-time applications.
🎉 News 🎉¶
🎤 Oral | 🎓 Tutorial | 🖼 Poster | 👨🏫 Invited talk
- 10 / 2024 : I have been awarded the 2024 PhD. Award of Paris-Est Sup University (top 6 of 251 doctors in 2023)
- 03 / 2024 : 2 papers accepted at CVPR2024: Learnable Earth Parser and OpenStreetView-5M.
- 09 / 2023 : I successfully defended my PhD thesis!
- 09 / 2023 : I am joining the insurance division of the French Treasury!
- 07 / 2023 : I just finished writting my phd manuscript and I am now preparing my defense!
- 01 / 2023 : Presenting my work on LiDAR Segmentation & Shape Collections at EPFL ENAC ECEO lab
- 12 / 2022 : Presenting our hearable model for audio identification at ISMIR 2022!
- 12 / 2022 : Presenting my work on LiDAR Segmentation & Shape Collections at the GTTI of the Centre Borelli
- 11 / 2022 : Presenting some of French Mapping Agency's (IGN) applications of deep learning for large-scale real-world 3D data at the German Mapping Agency (BKG)
- 10 / 2022 : Presenting my work on LiDAR Segmentation & Shape Collections at the ALLEGRIA seminar of the CEA-ISAS
- 10 / 2022 : Presenting our paper Online Segmentation of LiDAR Sequences: Dataset and Algorithm at ECCV 2022!
- 09 / 2022 : Presenting my work on LiDAR Segmentation & Shape Collections at INRIA Willow's scientific seminar
- 07 / 2022 : Meeting awesome people and presenting my work at VS3 summer school
- 06 / 2022 : Presenting our algorithm for online segmentation of LiDAR sequences at CVPR's Transformer for Vision workshop!
- 06 / 2022 : Presenting our hearable model for audio classification at CVPR's Sight and Sound workshop!
- 06 / 2022 : Animating a tutorial about Deep Learning for Point Clouds Semantic Segmentation at the XXIV ISPRS Congress
- 06 / 2022 : Invited at the XXIV ISPRS Congress to present our dataset and algorithm for online segmentation of LiDAR sequences!
- 05 / 2022 : Presenting our hearable model for audio classification at the Information, Signal, Image and Vision research group!
- 03 / 2022 : Presenting my work on LiDAR Segmentation & Shape Collections at the LIX laboratory seminar
- 10 / 2021 : Presenting our work on representing 3D shapes at ICCV's Learning 3D Representations for Shape and Appearance workshop!
- 10 / 2021 : Our work on representing 3D shapes has been accepted at 3DV 2021!
- 09 / 2020 : Starting PhD under the supervision of Mathieu Aubry and Loïc Landrieu
📜 Publications 📜¶
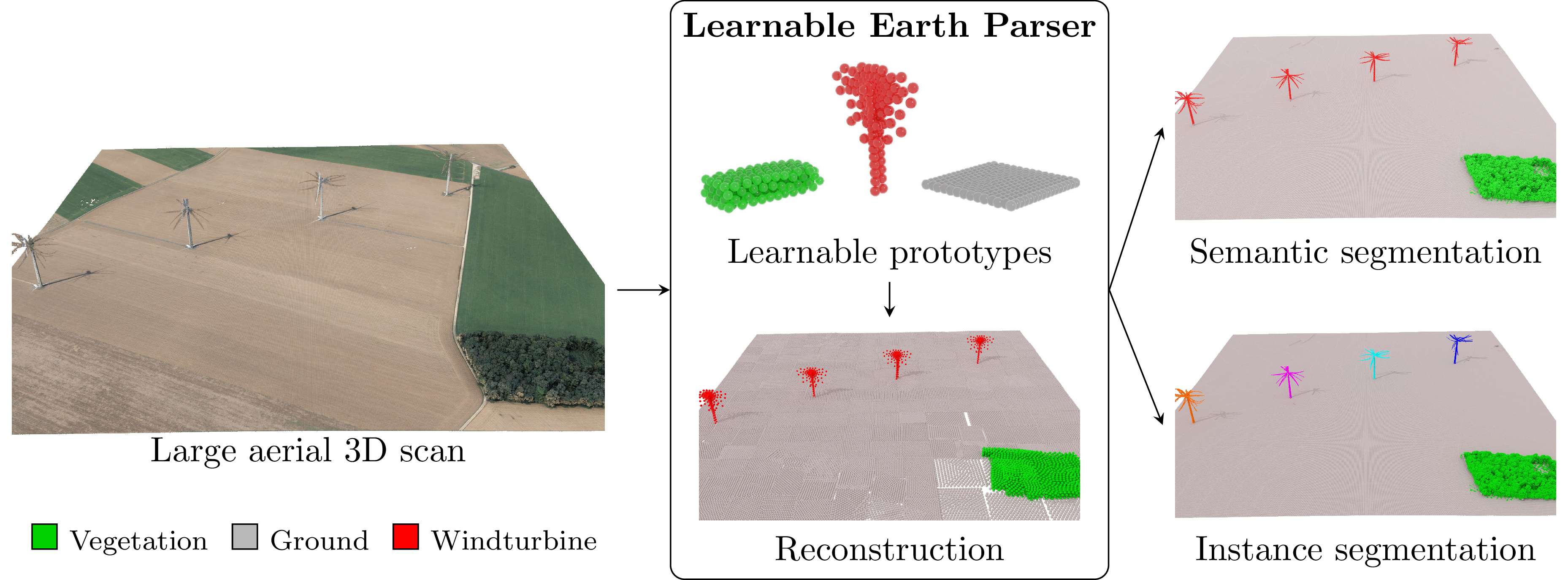
Romain Loiseau, Elliot Vincent, Mathieu Aubry, Loïc Landrieu
Paper | Webpage | Code | Download EarthParserDataset | Dataset's Toolbox
We propose an unsupervised method for parsing large 3D scans of real-world scenes into interpretable parts. Our goal is to provide a practical tool for analyzing 3D scenes with unique characteristics in the context of aerial surveying and mapping, without relying on application- specific user annotations. Our method offers significant advantage over existing approaches, as it does not require any manual annotations, making it a practical and efficient tool for 3D scene analysis.
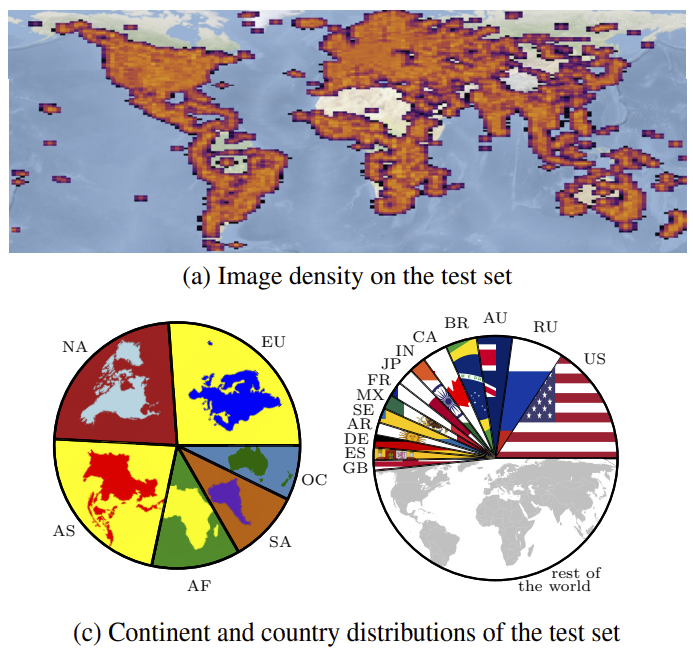
Guillaume Astruc, Nicolas Dufour, Ioannis Siglidis, Constantin Aronssohn, Nacim Bouia, Stephanie Fu, Romain Loiseau, Van Nguyen Nguyen, Charles Raude, Elliot Vincent, Lintao XU, Hongyu Zhou, Loïc Landrieu
Play | Paper | Webpage | Code | Data
Determining the location of an image anywhere on Earth is a complex visual task, which makes it particularly relevant for evaluating computer vision algorithms. Yet, the absence of standard, large-scale, open-access datasets with reliably localizable images has limited its potential. To address this issue, we introduce OpenStreetView-5M, a large-scale, open-access dataset comprising over 5.1 million geo-referenced street view images. To demonstrate the utility of our dataset, we conduct an extensive benchmark of various state-of-the-art image encoders, spatial representations, and training strategies.
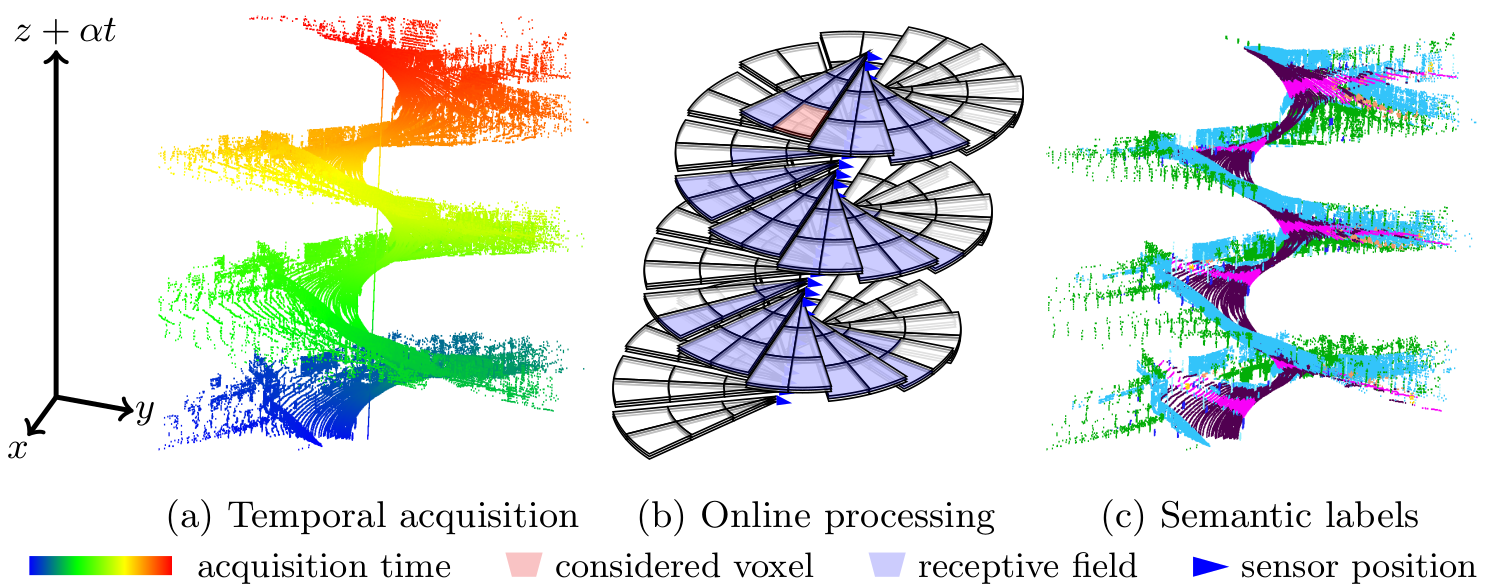
Romain Loiseau, Mathieu Aubry, Loïc Landrieu
Paper | Webpage | Helix4D Implementation | Download HelixNet | HelixNet Toolbox
First, we introduce HelixNet, a 10-billion point dataset with fine-grained timestamps and sensor rotation information. Second, we propose Helix4D, a compact and efficient spatio-temporal transformer architecture specifically designed for rotating LiDAR sequences that reaches accuracy on par with the best segmentation algorithms with a reduction of over 5× in terms of latency and 50× in model size.
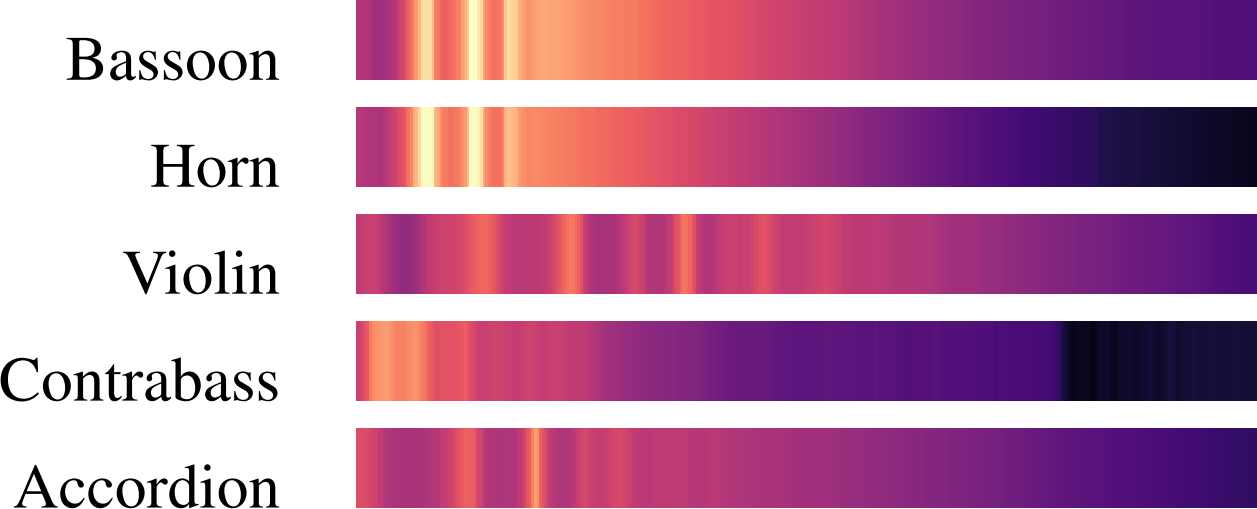
Romain Loiseau, Baptiste Bouvier, Yann Teytaut, Elliot Vincent, Mathieu Aubry, Loïc Landrieu
Paper | Webpage | Code
We propose an audio identification model based on learnable spectral prototypes. Our model can be trained with or without supervision and reaches state-of-the-art results for speaker and instrument identification, while remaining easily interpretable.
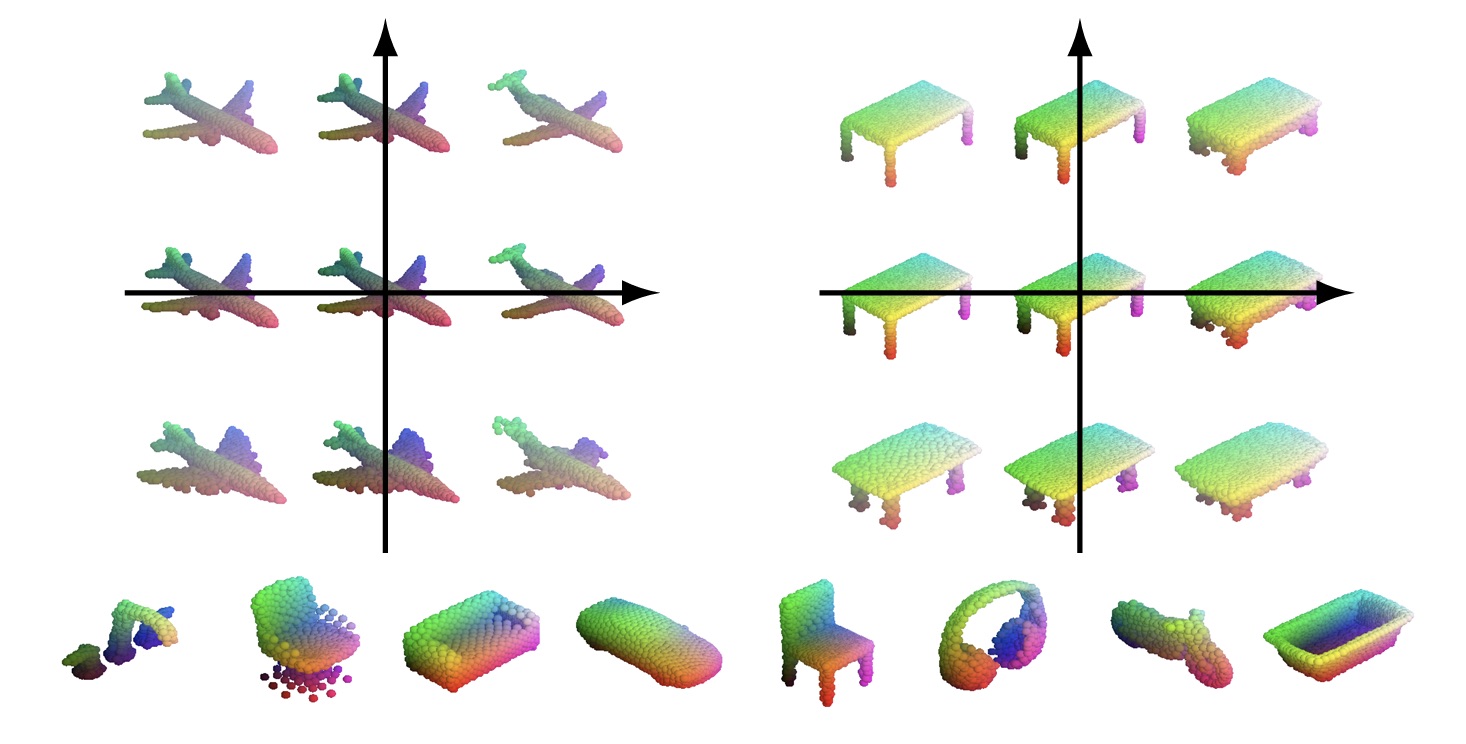
Romain Loiseau, Tom Monnier, Mathieu Aubry, Loïc Landrieu
Paper | Webpage | Code | Slides | Long video | Short video
We characterize 3D shapes as affine transformations of linear families learned without supervision, and showcase its advantages on large shape collections.
This work is an extension of the Deep Transformation-Invariant Clustering framework from Tom Monnier et al. for 3D tasks such as clustering and few-shot segmentation.
💼 Short Resume 💼¶
| 2023- | I moved to a position in the French Ministry of Economy and Finance, and continue to pursue some research activities as associate researcher at the LIGM |
| 2020-2023 | PhD student on "Semantic segmentation of dynamic 3D point clouds" supervised by Mathieu Aubry and Loic Landrieu. |
| Summer 2019 | Research intern on generative adversarial network for MRI spine labelling at GE Healthcare supervised by Mathieu Aubry. |
| 2018-2019 | Mathematics, Vision and Learning (MVA) master of the ENS-Cachan & engineering program of Ecole des Ponts ParisTech. |
| Summer 2018 | Research intern on the semantic segmentation of 3D point clouds using deep learning at Bentley Systems with Renaud Keriven. |
| 2015-2018 | Master in Computer science and biology at the Ecole polytechnique. |
You can find my detailled resume here.
LASTIG ML/CV reading group¶
For the year 2022-2023, I took over the LASTIG ML/CV reading group. The list of the talks can be found here: romainloiseau.fr/lastig-reading-group/